前馈控制系统
Feed Forward Control FFC
直接按扰动而不是按偏差进行控制。
提出背景
反馈控制系统 的缺点: 无法将干扰克服在被控制量偏离设计值之前。被控对象总是存在一定的纯滞后和容量滞后,故限制了控制作用的充分发挥。
前馈控制系统对干扰的克服要比反馈控制系统及时得多,干扰发生后,被控量还未显现出变化之前,控制器就产生了控制作用。
前馈与反馈的比较
| 前馈 | 反馈 | |
|---|---|---|
| 检测 | 测干扰,利用干扰控制 | 测被控量,利用偏差控制 |
| 稳定性 | 开环控制 | 闭环控制 |
| 效果 | 控制较为及时 | 存在一定的滞后,控制不及时 |
| 经济性 | 针对特定的干扰 | 可以克服多个扰动 |
前馈的局限性
前馈控制是有局限性的:
- 开环控制,无法对补偿结果进行检测
- 难以对每个干扰均设计前馈控制装置
- 一个固定的前馈模型难以获得良好的控制质量
结构形式
1. 静态前馈
控制器的输出仅仅是输入的函数,与时间无关,只能有效抑制静态偏差
2. 动态前馈
不但能有效抑制静态偏差;而且能有效抑制动态偏差
3. 复合控制
FFC-FBC) (前馈 + 反馈
既发挥了前馈校正及时的优点,又保持了反馈控制能抑制多个干扰并对被控量始终给予检验的长处。
- 只需对主要的干扰采用前馈补偿,大大简化了原来的纯前馈控制系统。
- 反馈回路的存在,降低了对前馈控制精度的要求,为工程上实现简单的前馈补偿创造了条件。
- 比纯反馈控制控制精度高、反应速度快,具有一定自适应能力。
Important
无论哪种形式的前馈控制系统,前馈控制器的传递函数均可以表示为对象的干扰通道和控制通道之比
4. 前馈-串级控制
采用串级控制系统:保证前馈控制的精度,常希望控制阀灵敏、线性等。
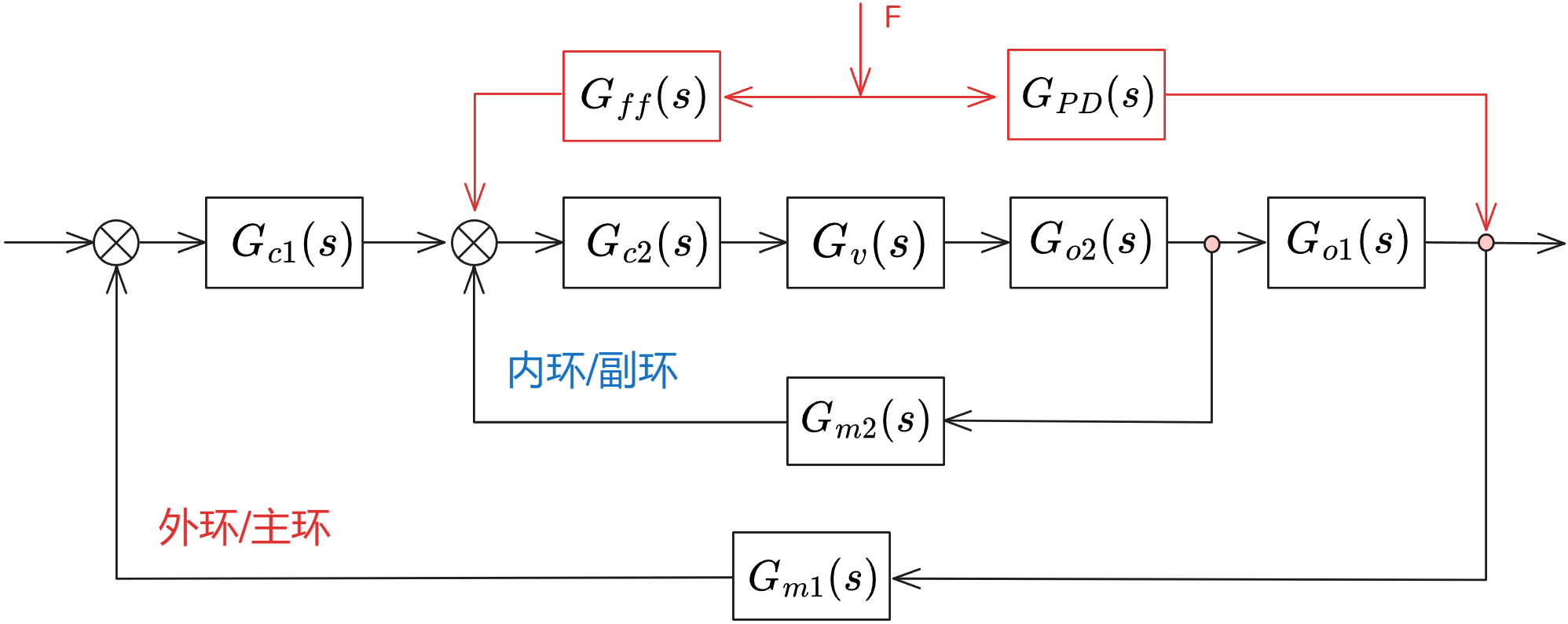
副回路等效,一般将副对象的传递函数近似为 1
一般控制器有两个输入信号:给定值和测量值,如果有多个输入信号,应该使用加法器
前馈控制的实施
控制通道的纯滞后一定小于扰动通道 ,所以